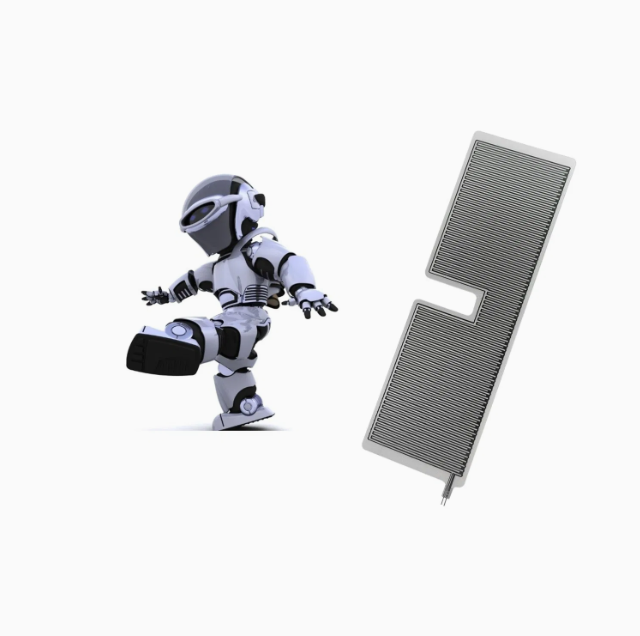
ロボットは自動車の製造から宇宙探査に至るまで、さまざまな作業を行うことができる優れた機械です。ロボットの重要な構成要素は、世界をどのように認識するかという点です。ここに接触センサーが登場します。接触センサーはロボットの「触覚」を担う部分です。私達が手を使って物を感じたり触れたりするように、ロボットが周囲の世界を認識し、それと相互作用するのを支援することができます。
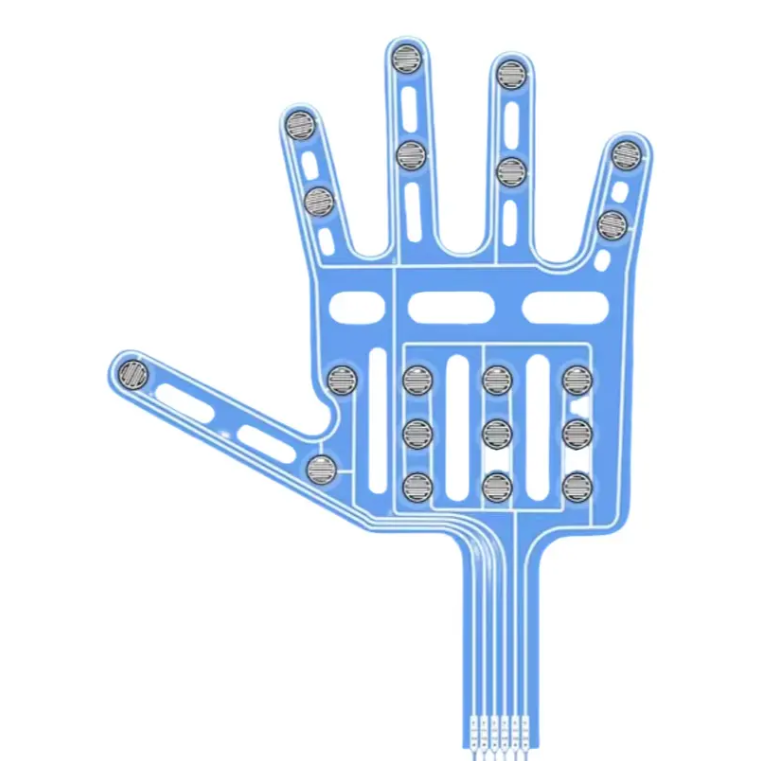
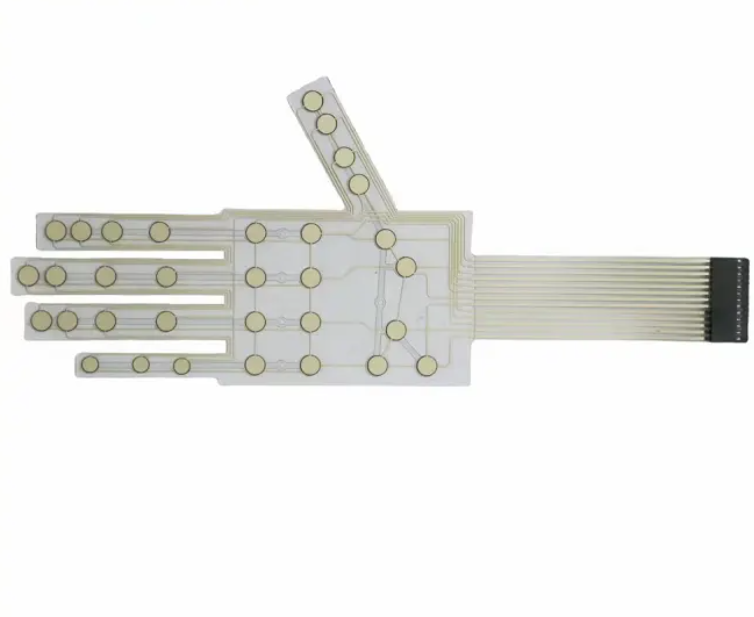
タッチセンサーは圧力や質感、温度などの物理的な接触を感知する特別な装置です。これによりロボットは接触している物体を「感じ」、その情報をもとに判断することが可能になります。タッチセンサーを備えたロボットは、壊れやすい物を持っても破損しないように扱ったり、熱いものを感知してやけどする前に手を引いたりといった動作が可能になります。

ロボットにとって、触覚センサーは世界と安全かつ効果的に相互作用するために不可欠です。ロボットが柔らかい接触を必要とする作業、例えば卵を割らずに拾い上げたり、混雑した空間内で隠れた物を探すような作業は行えません。またロボットは、接触した際にその物に触れたことを感知し、それに応じて動作を調整できるなら、触覚センサーを利用して周囲を移動することもできます。

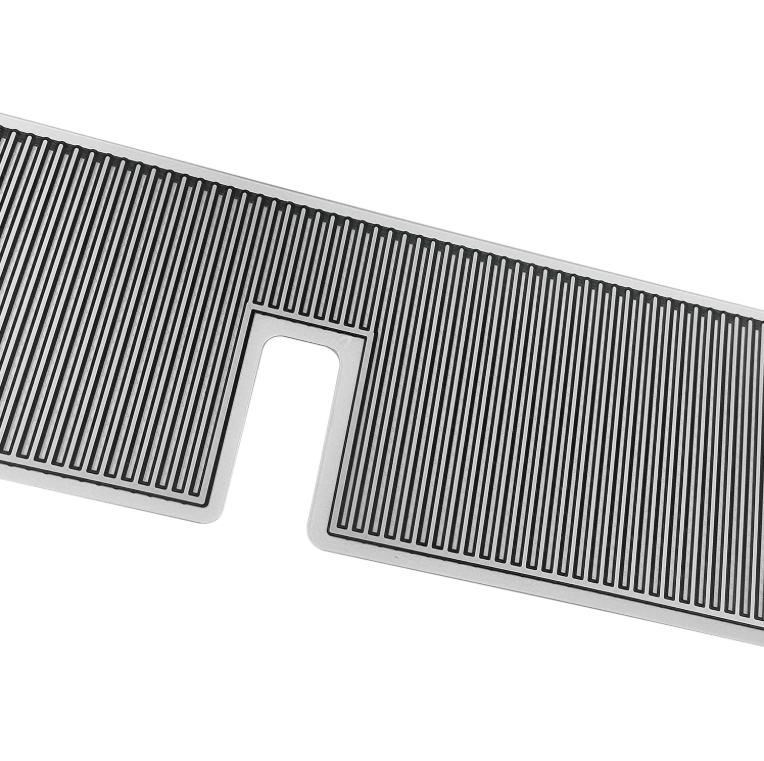
新技術の助けにより、触覚センサーは進化し、より賢くなっています。これによりロボットは、人間に近い方法で世界と関われるようになりつつあります。例えば、一部のロボットには現在、圧力や温度、振動や質感を感じ取れる人工的な皮膚が装備されています。これにより、ロボットは触れているものや周囲の環境をより正確に把握することが可能になります。
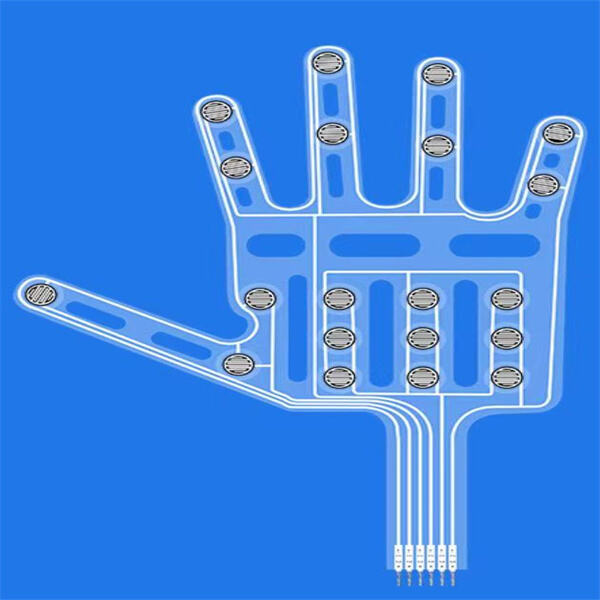
接触センサーに関する新たな注目点は、柔軟性があり伸縮可能な素材と併用できることです。これにより、人間の肌のようにロボットに接触センサーを適用することが可能になります。ロボットはこのようにして、楽器を演奏したり手術を行ったりするような繊細な作業を、より正確かつ丁寧に行えるようになります。
当社の工場はISO9001:2015、RoHS、ZHB環境システムの認証を取得しており、厳しい品質、安全性、環境基準を満たす製品を保証しています。
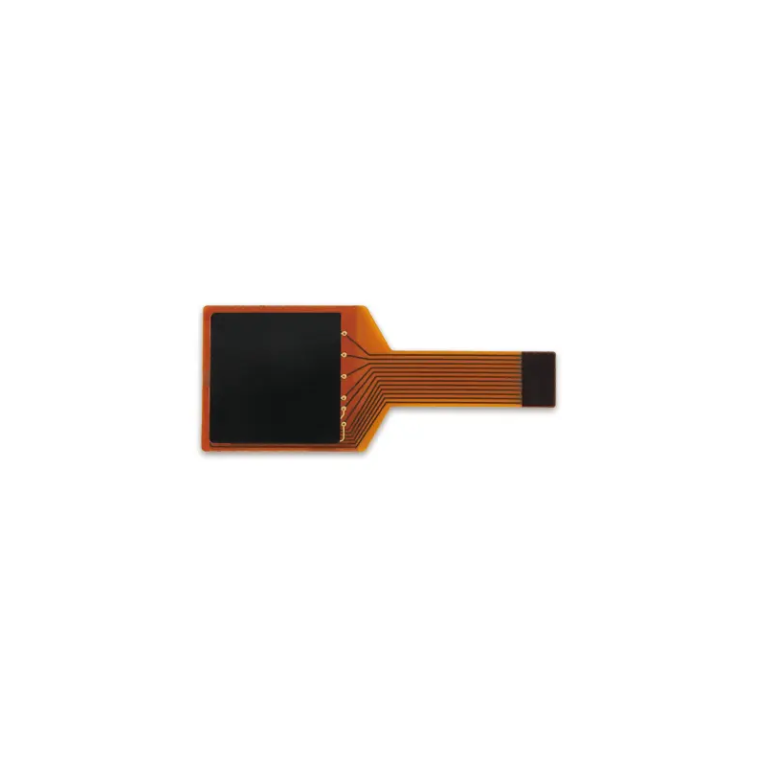
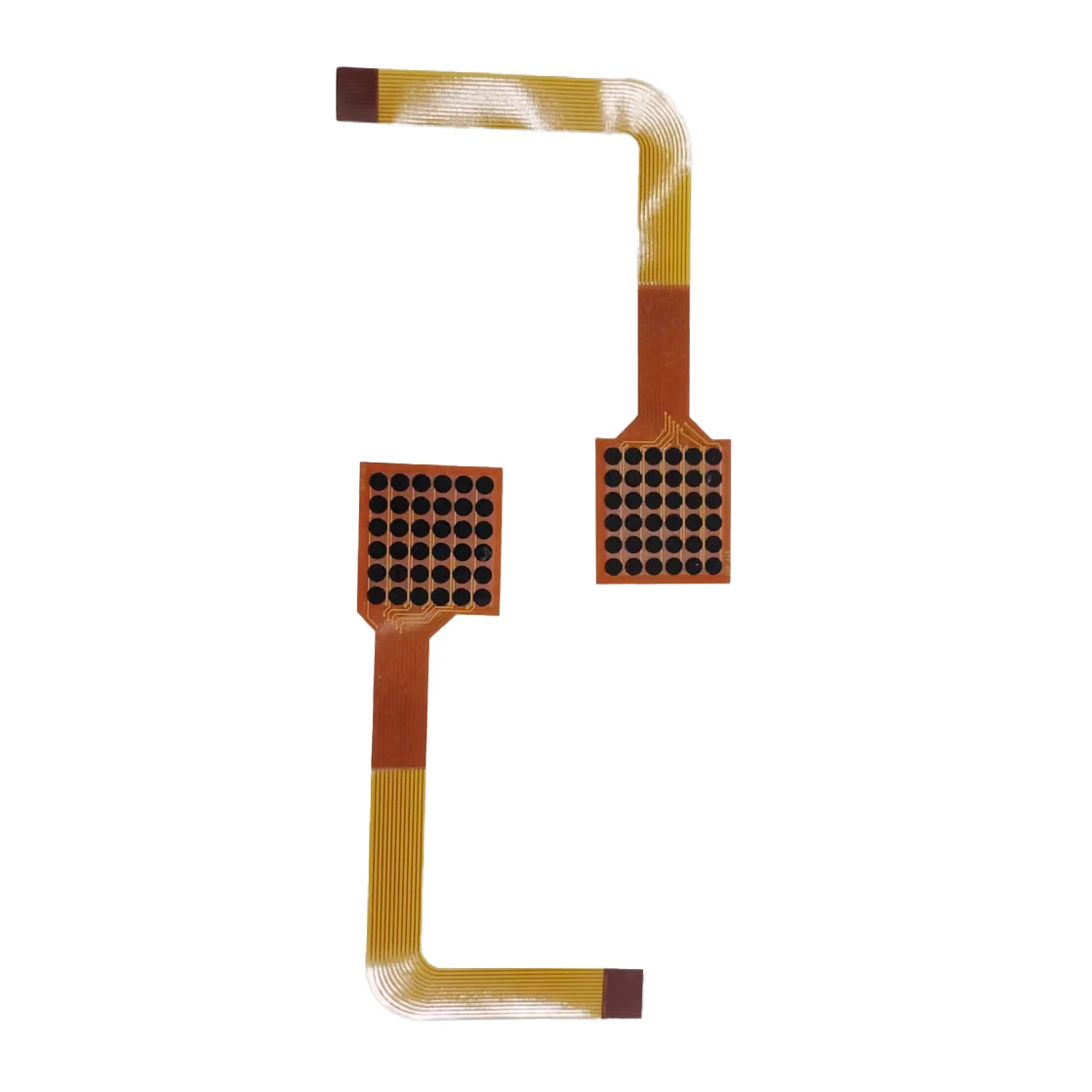
長年にわたり技術を牽引してきた経験を活かし、自動車、医療、産業制御など厳しい要求条件を持つ業界向けに、精密なメムブレンスイッチおよびFSRセンサーの統合設計、研究開発、製造を専門としています。
300台の設備と4つの生産ラインを備えた自社工場により、設計から納品までの全工程を完全に管理しており、世界中の顧客に対して迅速なカスタマイズとプロジェクト期間の短縮を実現しています。
24時間オンラインカスタマーサービスをご利用いただけます。8時間以内の返信を保証し、商品受領まで継続的に追跡することで、迅速なプロジェクトサポートと信頼性の高いアフターサービスを提供します。

著作権 © 東莞サウジン産業有限公司 すべての権利を留保します - プライバシーポリシー